提起輪胎制造廠,人們腦海中浮現的往往是嘈雜的機器轟鳴、彌漫的橡膠氣味和流水線上繁忙的工人。走進中策橡膠的5G工廠,傳統印象被徹底顛覆:空氣中不再有刺鼻的橡膠味,取而代之的是高效、智能與潔凈的生產環境。這一切的背后,離不開5G技術與先進的存儲支持服務的深度融合,它們共同驅動著這家輪胎制造巨頭邁向智能制造的新高度。
一、告別異味:5G賦能綠色智能生產
中策橡膠的5G工廠首先從源頭上解決了橡膠異味問題。通過5G網絡連接的全自動密閉生產線,原材料處理、密煉、硫化等關鍵工序均在高度密封的智能化設備中完成,揮發性氣體被實時收集與處理。5G的低延遲與大帶寬特性,使得生產數據的采集與設備控制指令的傳輸近乎實時,確保了生產過程的精準閉環管理,不僅提升了產品一致性,更大幅改善了車間環境。
二、數據驅動:存儲支持服務成為智能中樞
工廠的“無味”轉型,核心在于數據。從每一批原材料的質檢數據,到硫化過程中的溫度、壓力實時監控,再到成品輪胎的X光檢測影像,海量數據每時每刻都在產生。傳統的存儲系統難以應對如此龐大、多元且要求高速讀寫的工業數據流。
中策橡膠部署的先進存儲支持服務,構建了堅實的數字底座:
- 高性能存儲:采用全閃存陣列,滿足生產控制系統對極低延遲和高IOPS(每秒輸入輸出操作)的要求,確保關鍵工藝參數毫秒級響應。
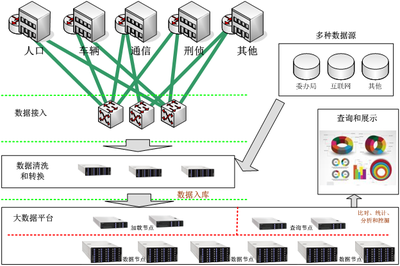
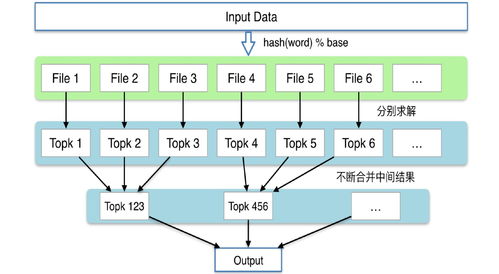
- 海量數據湖:建立彈性可擴展的數據湖,匯聚來自ERP、MES、SCADA及數以萬計物聯網傳感器的結構化與非結構化數據,為大數據分析與人工智能應用提供燃料。
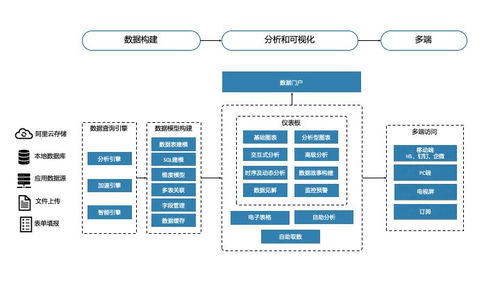
- 實時分析與備份:存儲系統與計算平臺緊密集成,支持對生產流數據的實時分析,即時預警潛在質量偏差。通過自動化備份與容災方案,保障核心工藝數據與生產訂單的絕對安全與業務連續性。
三、顛覆想象:全鏈路可視化與智能決策
在強大的5G網絡與存儲服務的支撐下,工廠實現了從訂單到交付的全鏈路數字化:
- 柔性生產:存儲系統中集成的客戶訂單與生產數據,驅動AGV小車和機械臂自動調整工序,實現小批量、多品種的柔性化生產。
- 預測性維護:設備運行數據持續存入時序數據庫,通過AI模型分析,提前預測電機、模具等關鍵部件的故障概率,變“被動維修”為“主動維護”,極大降低停機風險。
- 質量溯源:每一個輪胎的生產全流程數據(包括原材料批次、工藝參數、操作員、檢測結果)都被完整記錄并關聯其唯一的“身份證”(如RFID碼)。一旦出現售后問題,可瞬間追溯至源頭,實現質量問題的精準定位與快速改進。
四、存儲即服務,賦能未來制造
中策橡膠5G工廠的實踐表明,現代制造業的競爭已遠超設備和工藝層面,更深層次的是數據能力的比拼。可靠、高效、智能的存儲支持服務,已不再是簡單的IT后臺設備,而是成為驅動生產流程優化、產品質量躍升和商業模式創新的核心戰略資產。它讓“無橡膠味”的綠色工廠成為現實,更讓輪胎制造這個傳統行業,煥發出前所未有的精準、敏捷與智慧之光,徹底顛覆了人們對工廠的固有想象。隨著數據價值的深度挖掘,存儲與計算、網絡的融合服務,必將為工業互聯網打開更廣闊的空間。